




















| Quantité : | |
|---|---|
| Modèle | HB400D | |
| Corps de machine | Voyage X/Y | 400×300mm |
| Diamètre du fil d'électrode | φ0,10-φ0,25 mm | |
| Vitesse du fil | 1,18-11,8 m/s | |
| Poids net / poids brut | 1900kg/2500kg | |
| Dimension de la machine | L2020x L1700mm | |
| Pièce à usiner | Max. épaisseur de coupe | 300mm |
| Max. cône de coupe | ±10°/100mm | |
| Max. taille de la pièce | 930mm*550mm*300mm | |
| Max. poids de la pièce | 500kg | |
| Réservoir de fluide de travail | Précision de la filtration | 0,01 mm |
| Capacité | 130L | |
| Méthode de travail | Système de filtration multiple | |
| Alimentation à impulsions | Max. Vitesse de coupe | ≥300mm²/min |
| Meilleure finition de surface | Ra≤0,6 μm | |
| Courant maximum | 12A | |
| Système d'unité d'alimentation CNC | Configurations matérielles | Système d'asservissement à courant alternatif Interfaces de données USB et LANCompensation de pas sur quatre axesApprovisionnement centralisé en huile de lubrification |
| Port de connexion | USB, réseau local | |
| Code de programme | Code ISO | |
| Numéros d'axe | Contrôle simultané à 4 axes, réalisant une compensation de pas | |
| Bâton de joie | Standard | |
| Langue | Chinois, anglais, coréen, japonais | |
| Usinage de l'aluminium | Option | |
| Usinage du titane | Standard | |
| Commande numérique de l'axe Z | Standard | |
| Alimentation | Pouvoir | 3~380V+10% 50±10Hz |
| Température de l'environnement | 10 ~ 35 ℃ | |
| Consommation d'énergie | 1,5 KVA | |
La lubrification centralisée pour les vis des rails de guidage maintient l'atelier propre et bien rangé.

Puissance non électrolytique à grande vitesse pour inhiber la corrosion électrolytique, pour empêcher la formation de « couche adoucissante » et améliorer la qualité de la surface.
 |
 |
Le système servo AC importé permet une vitesse de coupe plus rapide et une précision plus élevée

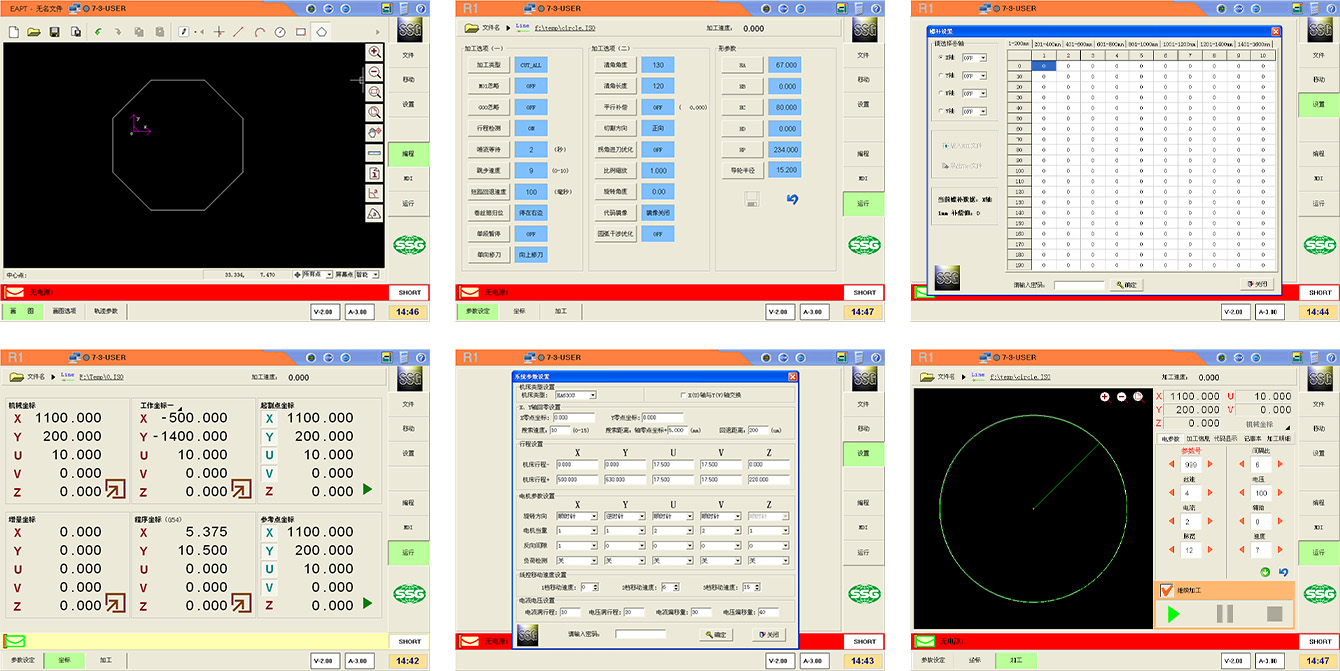
Système d'exploitation
Graphiques de programmation intégrés et programmes de code d'usinage préparés automatiquement. La fonction multi-CPU permet un traitement et une programmation simultanés.
Compensation parallèle, réglage d'angle clair, image du programme, optimisation des coins, mise à l'échelle et autres fonctions ouvertes.
Ouverture des données d'étalonnage de la portée laser et de compensation de pas en temps réel.
Le système de coordonnées multiples peut basculer rapidement entre les pièces.
Échangez les axes X et Y de manière aléatoire pour adapter différents états d'usinage. Réglez librement la vitesse de déplacement du contrôleur filaire.
Enregistrez les informations de suivi de l'usinage, pour surveiller l'usinage pendant une opération sans pilote afin de garantir la sécurité.
 HB400
HB400  HB600
HB600  HB800
HB800  LA350A
LA350A  LA500A
LA500A  LA800
LA800  EB450
EB450  EA500A
EA500A  EB650N
EB650N  DS703C
DS703C  SK450
SK450 












