




















| Количество: | |
|---|---|
| Модель | HB600D | |
| Корпус машины | X/Y путешествие | 600×400 мм |
| Диаметр электродной проволоки | φ 0,10-φ0,22 мм | |
| Скорость проволоки | 1,18-11,8 м/с | |
| Вес машины | 2500 кг | |
| Размер машины | 2260x1870 мм | |
| Заготовка | Макс. толщина резки | 300 мм |
| Макс. режущий конус | ±6°/100 мм | |
| Макс. размер заготовки | 1250х700х400мм | |
| Макс. вес заготовки | 900 кг | |
| Резервуар для рабочей жидкости | Точность фильтрации | 0,01 мм |
| Емкость | 130L | |
| Метод работы | Множественная система фильтрации | |
| Импульсный источник питания | Макс. Скорость резания | ≥300 мм?2;/мин |
| Лучшая обработка поверхности | Ра≤0,6 мкм | |
| Макс. ток | 12А | |
| Система блока питания с ЧПУ | Конфигурации оборудования | Сервосистема переменного тока Интерфейсы передачи данных USB и LAN. Четырехосевая компенсация шага. Централизованная подача смазочного масла. |
| Соединительный порт | USB, локальная сеть | |
| Программный код | ISO-код | |
| Номера осей | 4-осевое одновременное управление, реализация компенсации шага | |
| Джой Стик | Стандартный | |
| Язык | Китайский, английский, корейский, японский | |
| Обработка алюминия | Вариант | |
| Обработка титана | Стандартный | |
| Числовое управление по оси Z | Стандартный | |
| Источник питания | Власть | 3~380В+10% 50±10Гц |
| Температура окружающей среды | 10~35℃ | |
| Потребляемая мощность | 1,5 кВА | |
Централизованная смазка винтов направляющих обеспечивает чистоту и порядок в мастерской.

Высокоскоростная неэлектролитная мощность для подавления электролитической коррозии, предотвращения образования «размягчающего слоя» и улучшения качества поверхности.
 |
 |
Импортированная сервосистема переменного тока помогает ускорить резку и повысить точность.

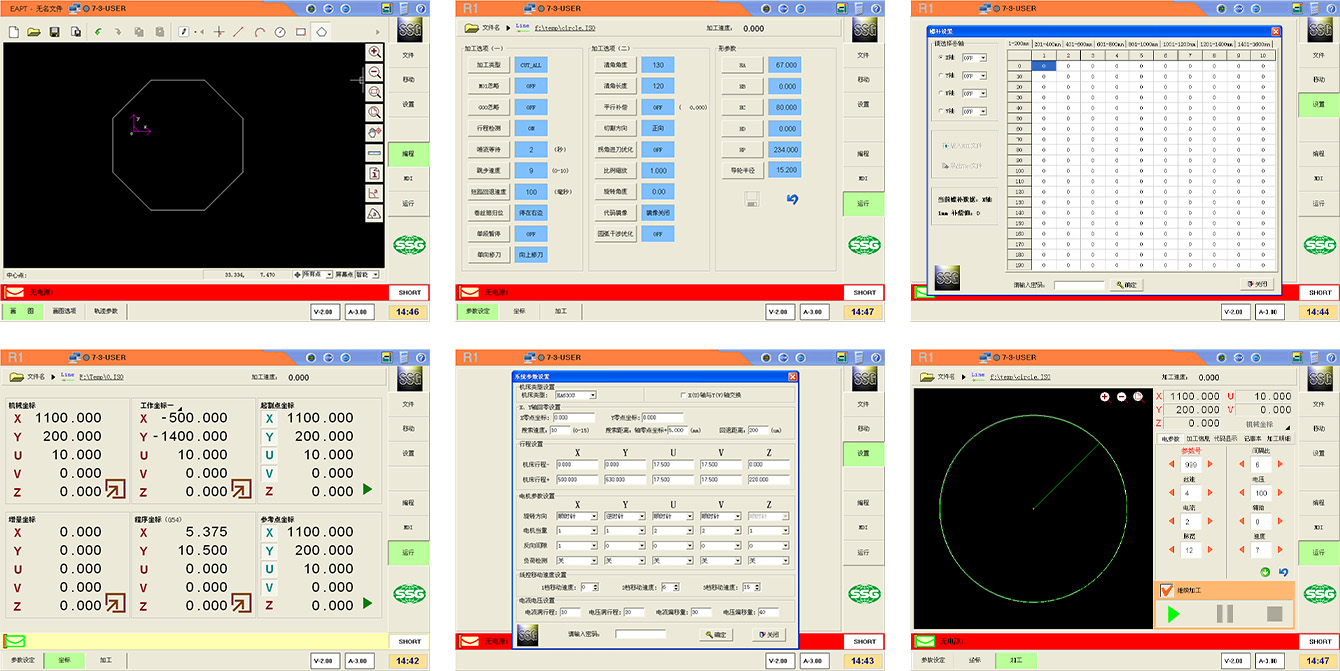
Операционная система
Встроенная графика программирования и автоматически подготовленные программы обработки кода. Функция мультипроцессора обеспечивает одновременную обработку и программирование.
Открыта параллельная компенсация, четкая настройка угла, изображение программы, оптимизация углов, масштабирование и другие функции.
Данные калибровки лазерной дальности и компенсации шага открываются в режиме реального времени.
Множественная система координат позволяет быстро переключаться между заготовками.
Поменяйте местами оси X и Y случайным образом, чтобы адаптировать различные состояния обработки. Установите свободную скорость перемещения проводного контроллера.
Записывайте информацию об отслеживании обработки, чтобы контролировать обработку во время беспилотных операций и обеспечивать безопасность.
 НВ400
НВ400  НВ600
НВ600  НВ800
НВ800  ЛА350А
ЛА350А  ЛА500А
ЛА500А  ЛА800
ЛА800  ЕВ450
ЕВ450  ЕА500А
ЕА500А  EB650N
EB650N  DS703C
DS703C  СК450
СК450 












